ラズパイで作るバイク用ドラレコ用のGPSを初期設定する
Raspberry Pi用にGPSモジュールを購入しました。使えるように準備していきます。
GPSモジュールはこちらを購入しました
GPS/GLONASS受信機(Galileo/BeiDou可)u‐blox M8搭載 みちびき3機受信対応: センサ一般 秋月電子通商-電子部品・ネット通販
USBシリアル変換モジュールはこちらです
FT234X 超小型USBシリアル変換モジュール: 半導体(モジュール) 秋月電子通商-電子部品・ネット通販
コネクタ(メス)
購入したGPSモジュールはケーブルがむき出しなので、ラズパイと気軽に接続出来るようにメスのコネクタを取り付けておきます。
USBシリアル変換モジュール
Windows用アプリでGPSモジュールの初期設定をするために使います。ピンが付属しますがはんだ付けされていないのではんだ付けします。
接続
USBシリアル変換モジュールとGPSを次のように接続します。
- 5V ー 赤
- GND ー 黒
- TXD ー 緑(RXD)
- RXD ー 橙(TXD)
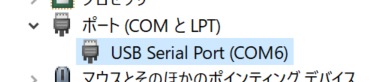
デバイスマネージャで接続を確認
USBシリアル変換モジュールをWindows機に接続します。初回はドライバーソフトウェアがインストールされます。インストールされたら、デバイスマネージャを開きCOMポート番号を確認します。このWindows機の場合はCOM6に割り当てられています。
u-centerのインストール
u-centerを使いGPSの動作確認と設定を行います。
「u-center 2」の方ではなく「u-center」の方をダウンロード、インストールします。
https://www.u-blox.com/en/product/u-center
インストールしたらu-centerを起動します。
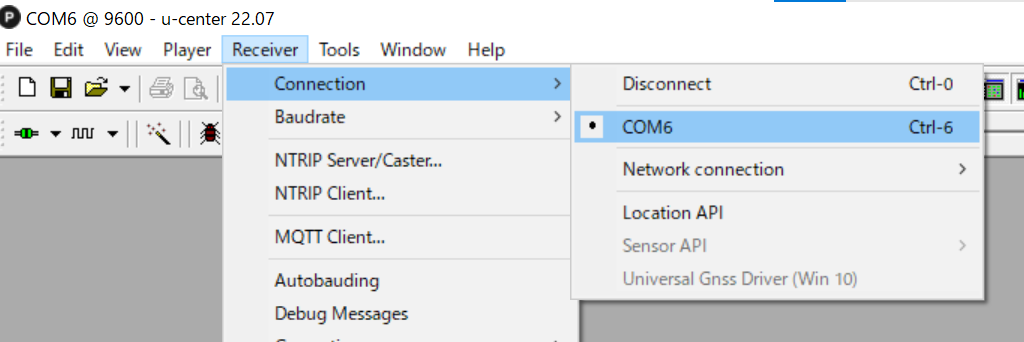
接続先の指定
Receiver – Connection – COM6(先ほど調べたCOMポート)
しばらく待って画面上にGPSが取得した情報が表示されればOKです。
gpsdの動作安定の為、通信速度を1152000に変更します
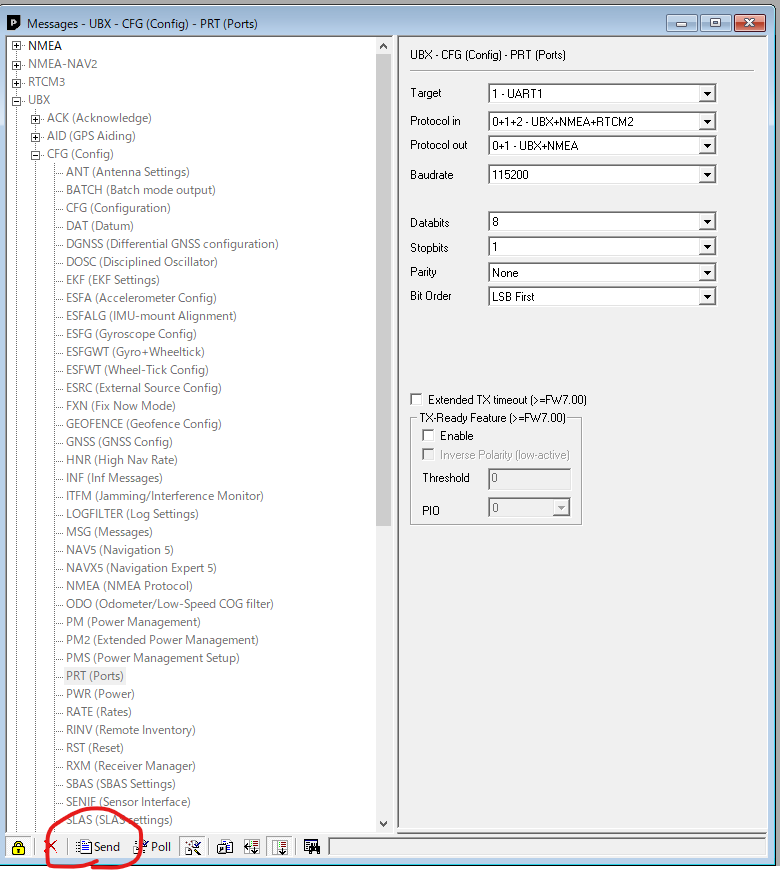
設定画面を開く
View – Message View
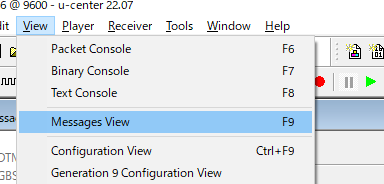
UBX – CFG(Config) – PRT(Ports) を選択
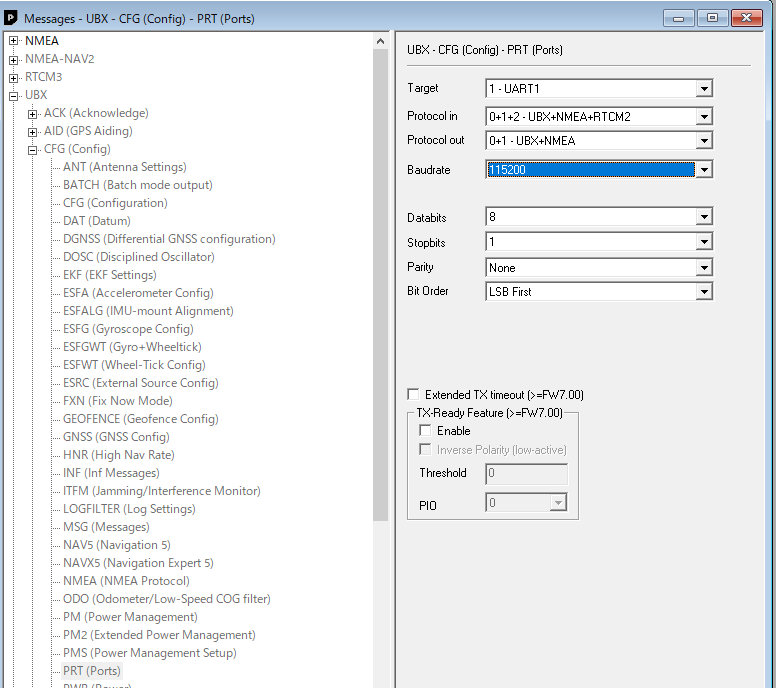
1152000に変更
Sendボタンを押す
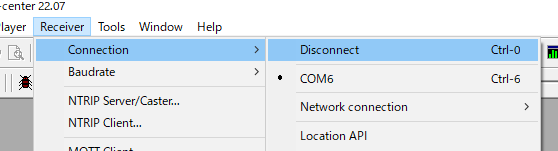
一旦接続を切る
Receiver – Connection – Disconnect
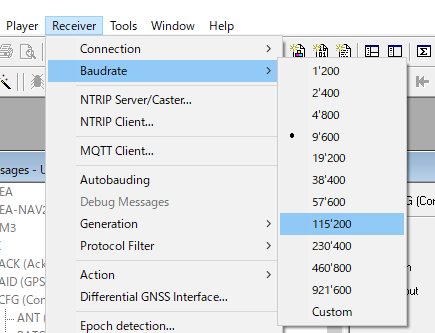
ボーレートを変更
Receiver – Baudlate – 1152000 を選択。
変更すると再度接続され、画面上の情報が更新されます。
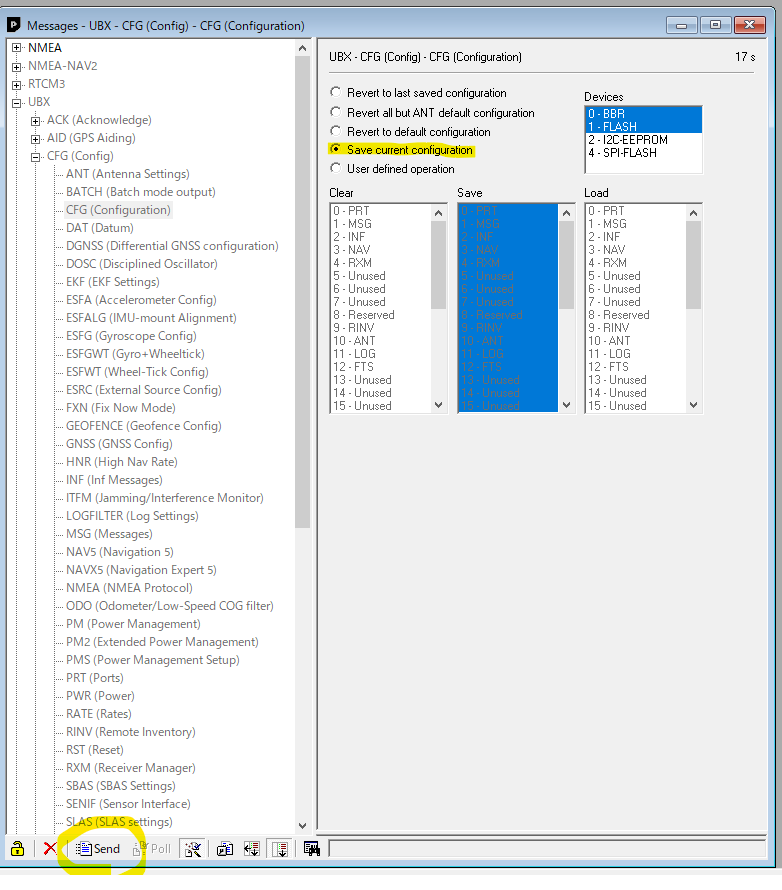
変更内容を不揮発性メモリに書き込み
UBX – CFG – CFG を開く
Save Current Configuration を選択
Sendボタンを押す
これで準備はOKです。Windows機とUSBシリアル変換モジュールを外し、Raspberry Piに接続して利用します。今日はここまでです。